它记录真实机器人经验
一条轨迹不是单帧图片,而是一段时序:观察、机器人状态、动作、语言指令随时间展开。
truhue.ai embodied data atlas / real robot data
DROID 是一个真实世界机器人操作数据集。它的关键不是“又多了一批视频”,而是把真实机器人在厨房、办公室、家庭等场景里的图像、动作、状态和语言指令,组织成可以训练机器人策略的数据。
每条 DROID 经验都包含机器人看到的场景、机器人自身状态、下一步执行动作和任务语言。它把一次真实操作转成可监督学习的时序样本,因此可以进入 imitation learning、VLA fine-tuning 和 co-training 流程。
资料核对:2026-05-28。主要依据 DROID 官方项目页、arXiv 论文、官方 visualizer / Colab / GitHub 代码与 Hugging Face 更新。
先把 DROID 从“数据集名字”拆成四个对象:采集系统、数据、训练接口、评测证据。
一条轨迹不是单帧图片,而是一段时序:观察、机器人状态、动作、语言指令随时间展开。
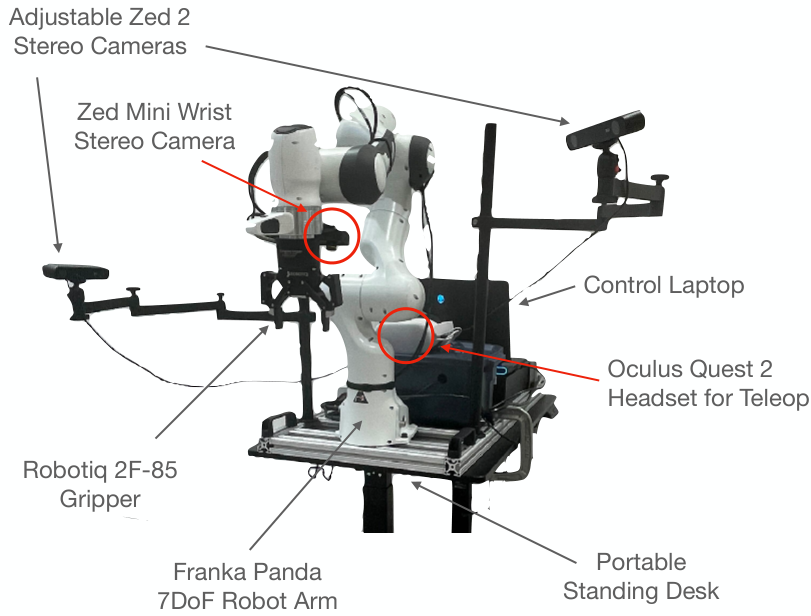
官方说明 13 个机构使用同一套 Franka Panda、ZED 相机、腕部相机和 Quest 2 遥操作配置。
算法不是直接“看网页视频”,而是从 batch 中学习:看到某种观察和指令时,下一步动作应该是什么。
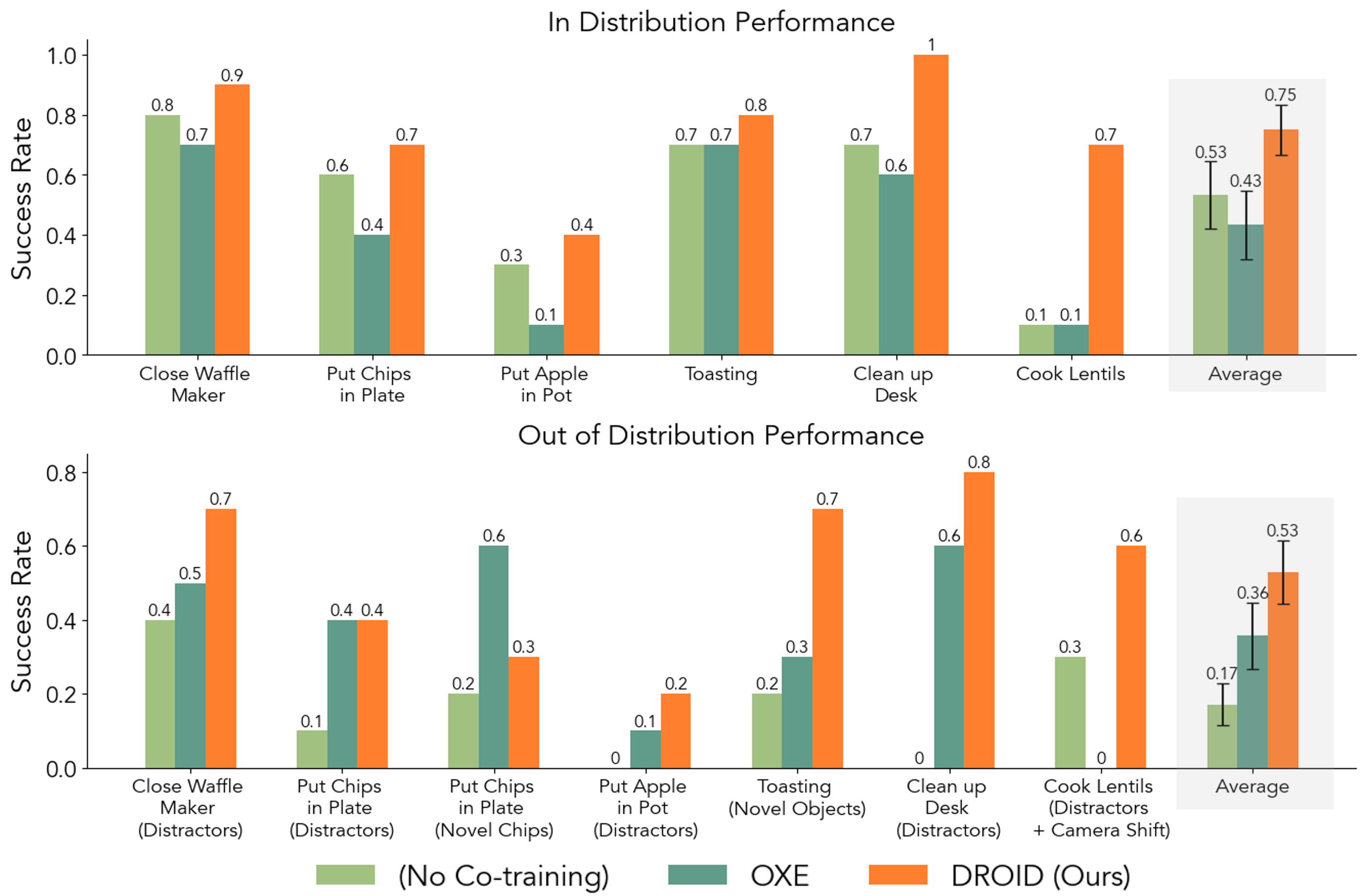
官方实验比较 DROID、Open-X 和 no co-train,并报告 DROID 帮助策略在 ID 和 OOD 任务上更稳。
DROID 的算法意义集中在四个概念:观察、动作、策略和分布外泛化。
机器人当下能看到和感到的东西。在 DROID 里包括第三方相机图像、腕部相机图像和机器人状态。
机器人下一步做什么。对操作任务来说,通常和末端执行器运动、夹爪开合、关节状态变化相关。
从 observation 和 instruction 到 action 的函数。训练目标是让这个函数在新场景里也能做对。
Out-of-distribution,指训练里没充分见过的物体、场景或干扰。机器人如果只会重复训练桌面,OOD 会很差。
DROID 的关键价值在这里:它把“现实中的一次操作”转成“模型可学习的一段序列”。
gs://gresearch/robotics 读取 droid split。import tensorflow_datasets as tfds
ds = tfds.load(
"droid",
data_dir="gs://gresearch/robotics",
split="train"
)
for episode in ds.take(5):
for step in episode["steps"]:
image = step["observation"]["exterior_image_1_left"]
wrist = step["observation"]["wrist_image_left"]
action = step["action"]
instruction = step["language_instruction"]机器人数据的核心不是“图片分类标签”,而是每个时间步都有观察、动作和指令。监督信号来自人类遥操作留下的动作轨迹,所以它天然适合 imitation learning 和 VLA policy fine-tuning。
字段以官方 quickstart、项目页和常见 robot dataset 结构归纳。具体 schema 以官方 loader 和数据卡为准。
| 字段 / 组件 | 给算法的含义 | 给机器人学习的意义 | 训练时的风险 |
|---|---|---|---|
episode["steps"] |
一条轨迹被拆成多个时间步。 | 模型学习的是时序决策,而不是静态识别。 | 轨迹长度、失败片段、采样频率都会影响训练。 |
exterior_image_1_left |
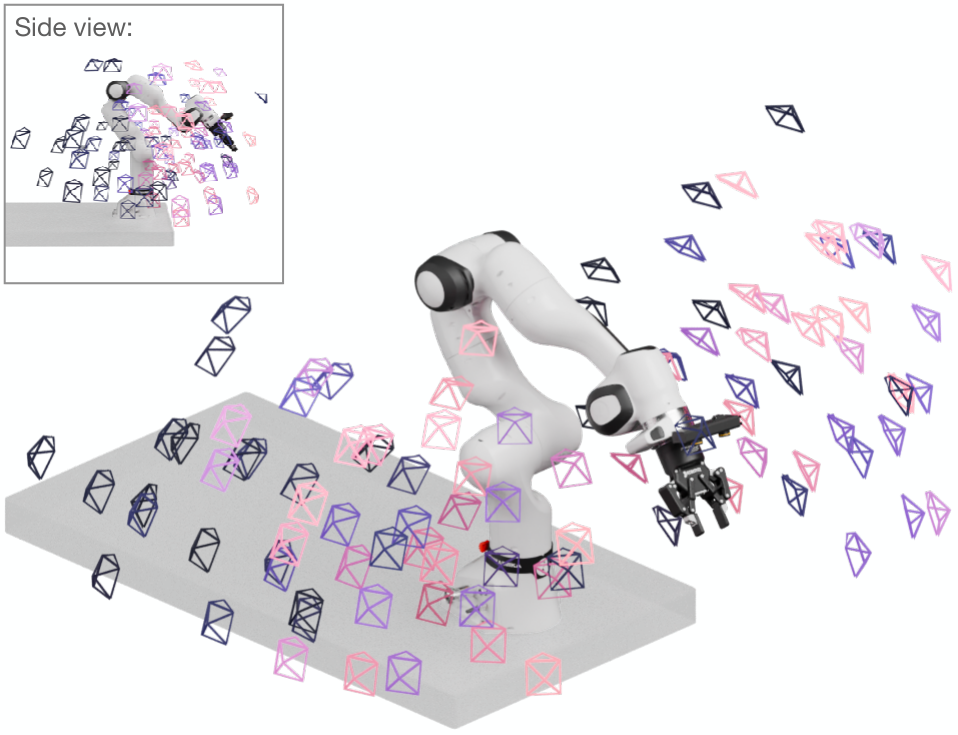
外部第三方相机图像。 | 给模型提供全局场景和物体布局。 | 相机外参变化会让视觉分布变宽,校准很重要。 |
wrist_image_left |
腕部相机图像。 | 提供靠近夹爪的接触和物体细节。 | 遮挡和运动模糊会影响末端操作判断。 |
action |
遥操作动作或控制目标。 | 这是 policy 训练的关键监督信号。 | 不同机器人动作空间不一致,跨数据集混合要谨慎。 |
language_instruction |
自然语言任务说明。 | 让同一模型可按任务意图条件化。 | 语言标注质量会影响 VLA 模型学习到的任务边界。 |
| camera calibration | 相机内参和外参。 | 支撑 3D 位置、视角融合和更稳的空间推理。 | 官方 2025 年 4 月更新提供 36k episodes 改进校准,说明早期数据仍会被修正。 |
普通视频通常只需要理解“发生了什么”。机器人数据还必须回答“下一步身体怎么动”。这要求图像、机器人状态、动作、语言、时间同步和硬件标定都能对齐。任意一环噪声过大,策略学到的就可能是错误动作。
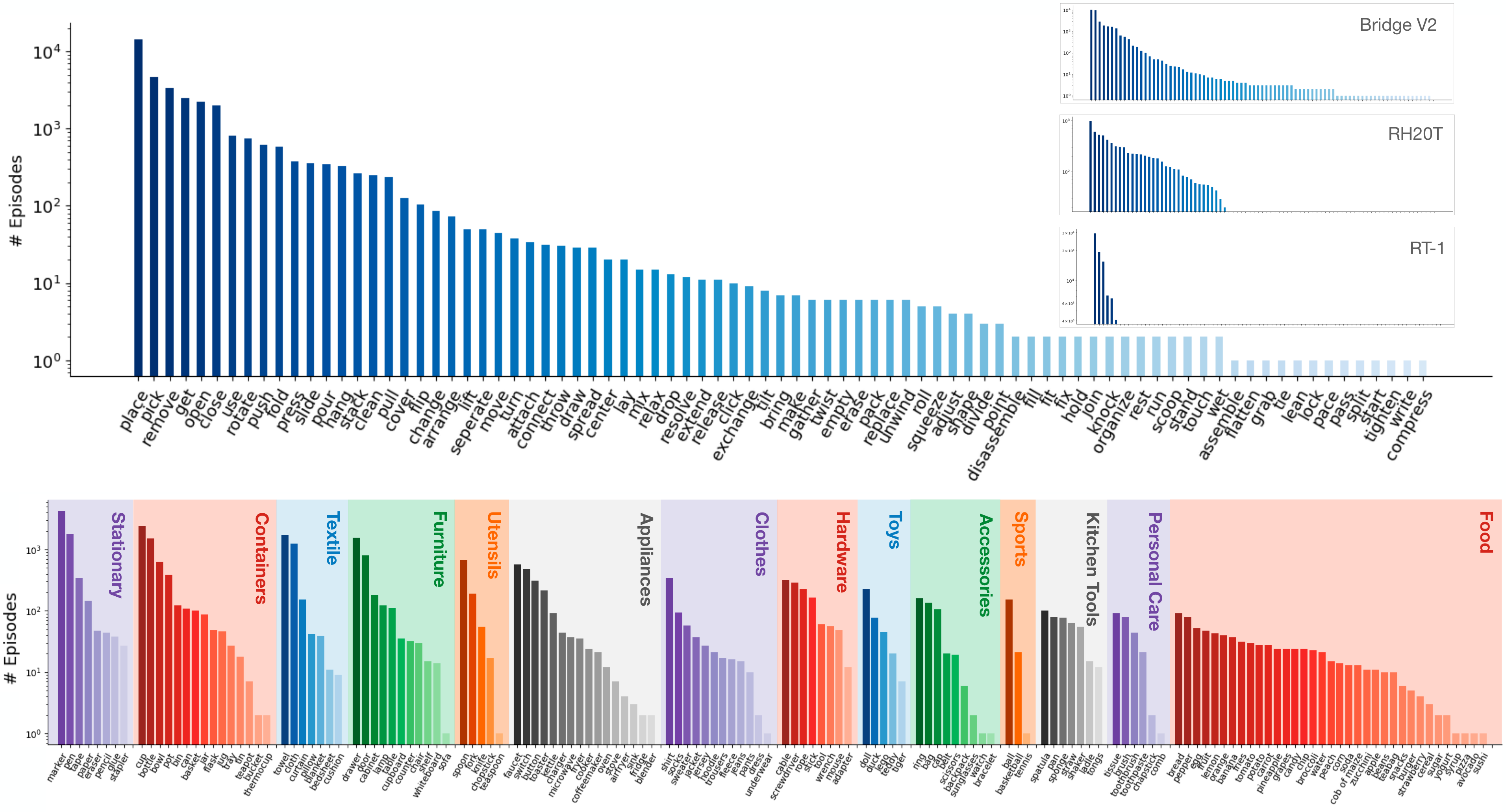
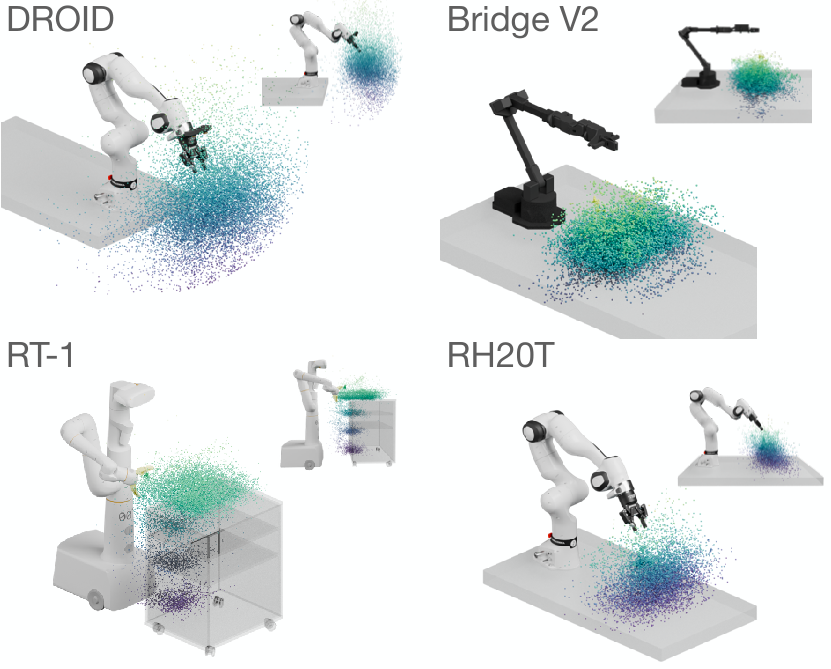
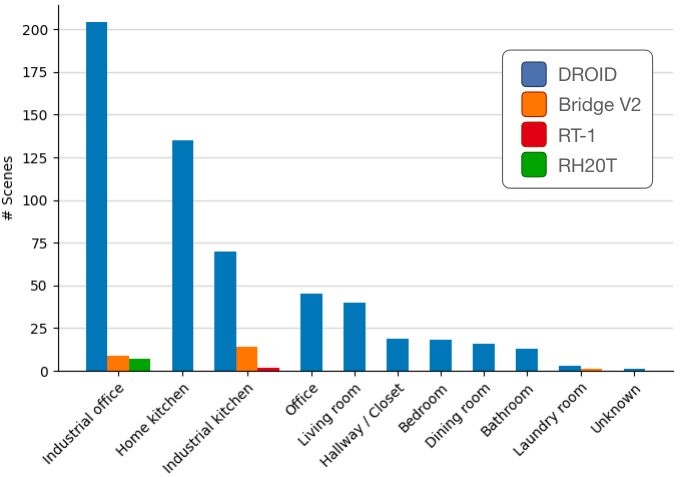
这些不是装饰图。它们分别说明了采集平台、场景多样性、动作分布和策略改进证据。
DROID 的核心主张不是“数据多”,而是“用这批真实数据 co-train 后,策略更稳”。
Policy learning 读取 DROID 的图像、状态、动作和语言,把每个时间步当作监督信号。模型看到相似视觉状态和任务指令时,学习输出接近人类遥操作的动作。co-training 的意思是:本地任务数据不够时,把 DROID 作为额外真实机器人经验加入训练。
真正有价值的不是训练集 loss,而是新场景、新物体、干扰物和家庭/办公室环境中,策略是否比 no co-train 或 Open-X co-train 更稳。官方项目页报告 DROID 在 ID 与 OOD 评测上都有提升。
DROID 处在“真实机器人轨迹数据”层,比人类视频更接近控制,比 VLA 模型更接近原始经验。
| 层级 | 项目 | 公开规模 / 对象 | 核心数据形态 | 和 DROID 的关系 |
|---|---|---|---|---|
| 人类第一视角 | Ego4D + Ego-Exo4D | 人类 ego / exo 视频 | 视频、姿态、音频、解说、技能理解 | 上游人类经验,没有机器人动作监督。 |
| 人类到机器人 | EgoVerse | 第一视角人类示范 | 把人类操作整理成 robot-learning friendly episodes | 比 DROID 更人类视角,离真实机器人动作更远。 |
| 真实机器人轨迹 | DROID | 76k trajectories / 350h / 564 scenes | 图像、动作、状态、语言、校准、采集平台 | 当前页核心对象。 |
| 跨机器人聚合 | Open X-Embodiment / RT-X | 1M+ trajectories / 22 embodiments | 多实验室、多机器人数据混合 | 更大更杂,强在跨 embodiment,弱在单平台一致性。 |
| 接触多模态 | RH20T | 110k+ sequences | 视觉、力、音频、动作和 human/robot demos | 比 DROID 更强调接触和多模态传感。 |
| VLA / policy stack | OpenVLA / OpenPI | 模型、checkpoint、训练代码 | 把 DROID/OXE 这类数据转成可部署策略 | DROID 是这些系统的真实机器人数据来源之一。 |
好的项目页不能只复述官方优点,也要说明边界、风险和什么证据会改变判断。
统一硬件、分布式采集、公开 dataset/code/setup guide,让小团队也能理解大规模真实机器人数据如何生产。
官方不只发布数据,还做了 co-training 与 OOD 评测。这比单纯公布小时数更有说服力。
Franka 平台让数据更干净,但也意味着它不是 humanoid、mobile manipulator 或多 embodiment 的完整覆盖。
真实环境多样性提升泛化潜力,也会带来标注不一致、相机校准、失败轨迹和动作质量差异。
最有力证据不是下载量,而是不同实验室、不同对象、不同场景里,DROID 预训练或 co-training 是否稳定提升成功率。
DROID 把采集硬件、数据浏览、loader、训练代码和策略评测连成一条链,适合作为真实机器人数据工程的参照物。
优先放官方项目、论文、数据浏览、代码、训练和后续更新入口。
项目主页、视频、数据分析图、实验结果。
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset。
官方交互式数据浏览入口。
官方 quickstart 代码示例。
复现硬件采集系统的说明入口。
硬件和采集相关代码。
策略训练代码。
语言标注和相机校准更新入口。